:rotate(0)/3afw40ihw1fm8t5l1tapzfbrc1kx)
We had lengthy discussions with our coaches, Anjali, David, and Aaron. Each had much to contribute. Anjali mentioned it might be cool to have sensors (heartbeat) to measure how Kai feels and that could affect the behavior of the arm. This would introduce the element of variability we were looking for. Another suggestion, from Adam, was to perhaps have a remote control away from the arm so another artist could control and interact with Kai. David said they also have breath sensors.
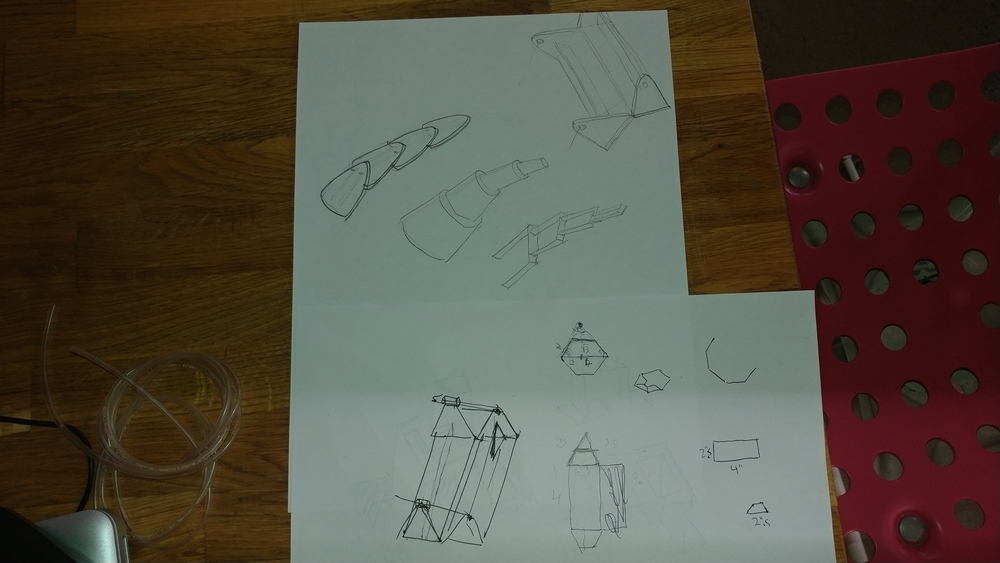
We had a lengthy discussion about robotics and the telescoping mechanism that would be needed to make the arm work. David and Aaron were really helpful in the discussion. They brainstormed how the mechanism might work. Rubber bands, springs, motors, a track system were all introduced as potential solutions. Numerous sketches were made (see photos). All of the solutions proved to be problematic.
Then Aaron mentioned the Thomas Heatherwick Bridge in England.
This folding mechanism might be the easiest way to complete our vision. I believe we lose some of the aesthetic, but maybe I'll be proven wrong.